 Javad Foroughi, Geoffrey M. Spinks, Gordon G. Wallace, Jiyoung Oh, Mikhail E. Kozlov, Shaoli Fang, Tissaphern Mirfakhrai, John D. W. Madden, Min Kyoon Shin, Seon Jeong Kim, Ray H. Baughman
Javad Foroughi, Geoffrey M. Spinks, Gordon G. Wallace, Jiyoung Oh, Mikhail E. Kozlov, Shaoli Fang, Tissaphern Mirfakhrai, John D. W. Madden, Min Kyoon Shin, Seon Jeong Kim, Ray H. Baughman
. 1Intelligent Polymer Research Institute, ARC Centre of Excellence for Electromaterials Science, University of Wollongong, Wollongong, NSW 2522, Australia.
2. Alan G. MacDiarmid NanoTech Institute, University of Texas at Dallas, Richardson, TX 75083, USA.
3. Department of Electrical and Computer Engineering, University of British Columbia, Vancouver, BC V6T 1Z4, Canada.
4. Center for Bio-Artificial Muscle and Department of Biomedical Engineering, Hanyang University, Seoul 133-791, South Korea.
*Corresponding author.E-mail: gspinks@uow.edu.au (G.M.S.); ray.baughman@utdallas.edu (R.H.B.).
원문 링크 : http://www.sciencemag.org/content/334/6055/494.full
Abstract
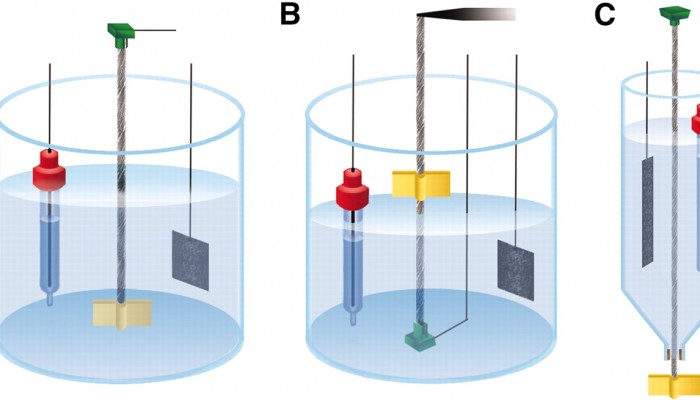
Rotary motors of conventional design can be rather complex and are therefore difficult to miniaturize; previous carbon nanotube artificial muscles provide contraction and bending, but not rotation. We show that an electrolyte-filled twist-spun carbon nanotube yarn, much thinner than a human hair, functions as a torsional artificial muscle in a simple three-electrode electrochemical system, providing a reversible 15,000° rotation and 590 revolutions per minute. A hydrostatic actuation mechanism, as seen in muscular hydrostats in nature, explains the simultaneous occurrence of lengthwise contraction and torsional rotation during the yarn volume increase caused by electrochemical double-layer charge injection. The use of a torsional yarn muscle as a mixer for a fluidic chip is demonstrated.