 Marcio D. Lima, Na Li, Monica Jung de Andrade, Shaoli Fang, Jiyoung Oh, Geoffrey M. Spinks, Mikhail E. Kozlov, Carter S. Haines, Dongseok Suh, Javad Foroughi, Seon Jeong Kim, Yongsheng Chen, Taylor Ware, Min Kyoon Shin, Leonardo D. Machado, Alexandre F. Fonseca, John D. W. Madden, Walter E. Voit, Douglas S. Galvao, Ray H. Baughman
Marcio D. Lima, Na Li, Monica Jung de Andrade, Shaoli Fang, Jiyoung Oh, Geoffrey M. Spinks, Mikhail E. Kozlov, Carter S. Haines, Dongseok Suh, Javad Foroughi, Seon Jeong Kim, Yongsheng Chen, Taylor Ware, Min Kyoon Shin, Leonardo D. Machado, Alexandre F. Fonseca, John D. W. Madden, Walter E. Voit, Douglas S. Galvao, Ray H. Baughman
Center for Bio-Artificial Muscle and Department of Biomedical Engineering, Hanyang University, Seoul 133-791, Korea
*Corresponding author.E-mail: sjk@hanyang.ac.kr.
원문 링크 : http://seonjeongkim.cafe24.com/link
Abstract
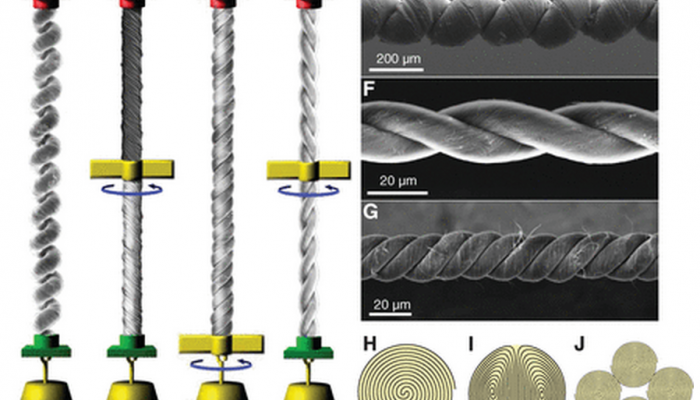
Artificial muscles are of practical interest, but few types have been commercially exploited. Typical problems include slow response, low strain and force generation, short cycle life, use of electrolytes, and low energy efficiency. We have designed guest-filled, twist-spun carbon nanotube yarns as electrolyte-free muscles that provide fast, high-force, large-stroke torsional and tensile actuation. More than a million torsional and tensile actuation cycles are demonstrated, wherein a muscle spins a rotor at an average 11,500 revolutions/minute or delivers 3% tensile contraction at 1200 cycles/minute. Electrical, chemical, or photonic excitation of hybrid yarns changes guest dimensions and generates torsional rotation and contraction of the yarn host. Demonstrations include torsional motors, contractile muscles, and sensors that capture the energy of the sensing process to mechanically actuate.